Produktnummer:
GFP.1406
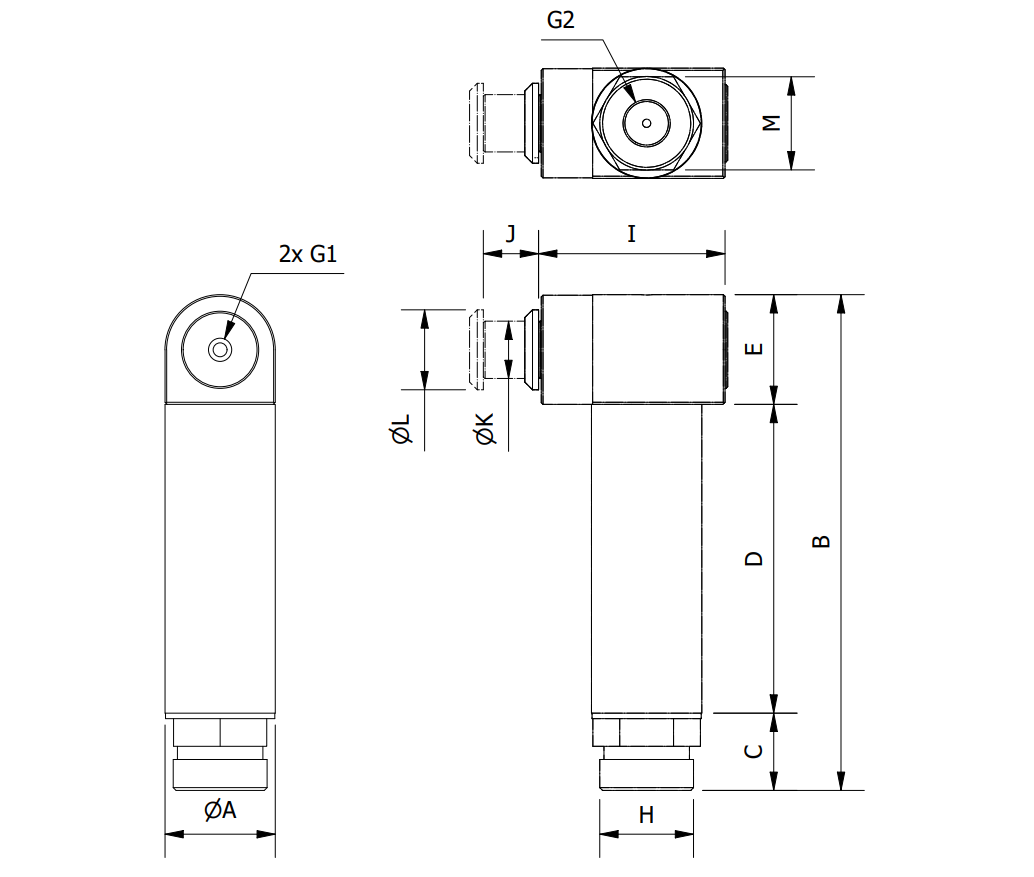
Finger Greifer M5 6 mm - senkrecht
- Roborex
Dateien
| Name | Herunterladen | File type |
|---|---|---|
| Perpendicular.Finger.Gripper.14.Stroke.6mm_GFP.1406.STEP.stp | 222 KB | .stp |
Bilder





Spezifikation
Arbeitsprinzip: Einfachwirkend; Arbeitsdruck: 6 bar saubere, trockene Luft; Material: Silber eloxiertes Aluminium; Durchgangsbohrung für Vakuum an einem Sauger; Viton-Polster für weichen Kontakt.